-


-
-


-


-


WeChat

-
WhatsApp


Два колеса или четыре? Стратегический выбор компоновки привода транспортного робота.
2025-10-17
Как основная система AGV, выбор конфигурации привода напрямую влияет на эффективность, надежность и окупаемость инвестиций всей системы перемещения материалов. Среди этих решений стратегический выбор между двухколесным и четырехколесным рулевым приводом представляет собой ключевой аспект, который каждый конструктор AGV должен тщательно оценивать.

Фундаментальные различия: Не просто удвоение количества
Многие могут предположить, что система с четырьмя рулевыми колесами — это простое количественное расширение двухколесной системы. В действительности, она представляет собой комплексную модернизацию — от механической конструкции до системы управления движением.
Существенное различие в механической структуре
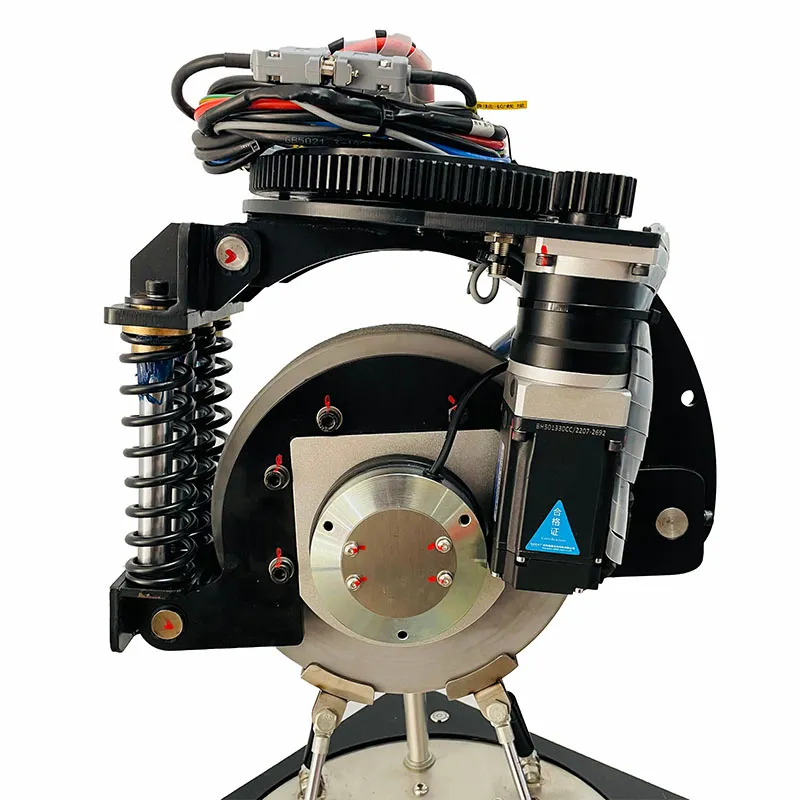
Двухколесная рулевая система: Обычно использует компоновку «два ведущих колеса + 1 опорный ролик» или «два ведущих колеса + 2 опорных ролика». Два интеллектуальных рулевых колеса (совмещающих функции привода, управления направлением и нагрузки) обеспечивают мощность и контроль направления, а одно или несколько пассивных колес служат для поддержки и следования по траектории. Данная структура относительно проста.

Четырехколесная система: Использует четыре полностью идентичных интеллектуальных колеса, симметрично расположенных по четырем углам транспортного средства. Эта конструкция «полного привода» полностью исключает традиционные пассивные колеса. Каждое колесо активно создает усилие и управляется независимо, что приводит к экспоненциальному росту механической сложности.
Поколенческий скачок в мобильности
Двухколесная рулевая система: Обеспечивает базовую всенаправленную мобильность, включая движение вперед/назад, повороты с произвольным радиусом и разворот на месте. Ее модели перемещения удовлетворяют большинству традиционных задач транспортировки материалов, предлагая гибкость, значительно превосходящую традиционные погрузчики и AGV с дифференциальным приводом.
Четырехколесная рулевая система: Представляет собой вершину современной мобильности AGV. Благодаря точному векторному синтезу управления скоростью и углом поворота всех четырех колес от центрального контроллера, AGV достигают истинно всенаправленного движения: прямолинейное движение, боковое перемещение, диагональное движение и вращение вокруг любой точки. Эта возможность предлагает революционные преимущества в условиях чрезвычайно узких и перегруженных пространств.

Сложная иерархия алгоритмов управления
Алгоритмы управления для двухколесной рулевой системы относительно отработаны и зрелы. Ключевая же сложность четырехколесной системы заключается в координированном управлении множеством колес. Контроллер должен в реальном времени вычислять управляющие команды для всех четырех колес, гарантируя, что они «тянут в одном направлении», чтобы избежать потерь на внутренние силы, вызванных рассогласованием (когда колеса буквально «мешают» друг другу). Это предотвращает повышенное энергопотребление, износ компонентов и даже вибрацию транспортного средства. Такая задача предъявляет исключительно высокие требования к вычислительной мощности контроллера и сложности алгоритмов.
Сравнительный анализ преимуществ: Оптимальный баланс производительности, стоимости и сценариев применения
Двухколесный рулевой привод: Лидер по рентабельности, практичный выбор
Ключевые преимущества:
Исключительная рентабельность: Рулевые модули являются одними из самых дорогостоящих компонентов AGV. Использование двух вместо четырех напрямую снижает затраты на закупку аппаратного обеспечения, мотор-редукторов и прокладку кабелей, что обеспечивает высококонкурентную итоговую стоимость.
Низкая сложность обслуживания: Меньшее количество подвижных частей означает снижение частоты отказов. Относительно простая система облегчает техническое обслуживание и предъявляет более низкие требования к квалификации персонала.
Соответствие стандартным требованиям: Для большинства сценариев, включая складскую логистику, транспортировку материалов на производственных линиях и операции отбора, гибкости и грузоподъемности (обычно 1-3 тонны), обеспечиваемых двухколесной системой, вполне достаточно. Это делает ее надежным, устойчивым и экономичным решением для автоматизации.
Потенциальные ограничения:
На сильно неровных поверхностых может возникать проскальзывание ведущих колес из-за подвеса ведомых колес.
Недостижимо точное боковое перемещение, требующее алгоритмической компенсации при отслеживании траектории.
Грузоподъемность имеет верхний предел, что делает систему непригодной для задач с тяжелыми грузами.
Четырехколесный рулевой привод: Флагман производительности, профессиональная мощь
Ключевые преимущества:
Исключительная грузоподъемность и стабильность: Четыре рулевых колеса распределяют нагрузку и привод, легко справляясь с тяжелыми условиями от 3 тонн до десятков тонн. Стабильная опорная платформа, образуемая четырьмя колесами, обеспечивает непревзойденную устойчивость против опрокидывания при работе на высоких скоростях или с поднятыми грузами.
Предельная маневренность: Истинно всенаправленное движение позволяет выполнять точные позиционные корректировки в ограниченных пространствах, недостижимые для других AGV. Идеально для позиционирования с миллиметровой точностью в авиационной сборке, производстве точных приборов и работе в сверхузких проходах.
Превосходная адаптация к рельефу: Полный привод обеспечивает мощное сцепление и тягу, позволяя преодолевать такие распространенные препятствия в цехах, как пологие уклоны, стыки покрытий и неровные поверхности, при значительном снижении риска проскальзывания.
Потенциальные ограничения:
Высокие первоначальные инвестиции: Затраты на аппаратное обеспечение и разработку системы существенно превышают затраты для двухколесных рулевых систем.
Высокая сложность и стоимость обслуживания: Для ремонта и технического обслуживания требуются специализированные технические команды.
Относительно высокое энергопотребление: Необходимость питания четырех мотор-редукторов обычно приводит к большему общему энергопотреблению.

Наша компания обладает зрелыми технологиями платформ как с двухколесным, так и с четырехколесным приводом, подкрепленными многолетним опытом успешного применения в различных отраслях промышленности.